4.7. Use of tweens¶
A tween is a way to connect two clips. The software will automatically match drones from the first clip with drones from the second clip and create a smooth transition between the two clips.
E.g. suppose you have a clip in a star form and another in a circle form. By adding a tween between the two clips, the drones forming the star will move to form the circle during the tween.
4.7.1. Add a tween¶
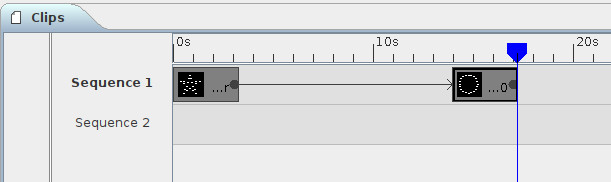
To place a tween, place your mouse arrow on the ball that you find at the end of each clip => the mouse arrow changes into a cross => click and with the mouse button pressed drag the connecting line to the start of the clip that you want to connect => release mouse button.
Now the drones in the first clip will get matches with the drones of the second clip and a transition between the clips will be created.
Warning: tweens work best if the number of drones between clips are equal. If they are not, the system will silently hide the excess of drones or add drones to match the clips.
4.7.2. Multiple tweens¶
It is also possible to link a clip with several clips. You just do the same with another clip and a new tween will be added.

Which will result in the system matching the drones from the first clip and match with the drones of all receiving clips and create a tween between them.
When creating a tween between clips it is not possible to create a tween between two clips that both have (respectivily start and ending) tweens already.

- Case a
Clip 1 has multiple tweens starting
Clip 2 has no tweens ending
=> Tween is possible
- Case b
Clip 1 has no tweens starting (ending tweens don’t matter).
Clip 2 has no tweens ending
=> Tween is possible
- Case c
Clip 1 has multiple starting tweens
Clip 2 has one ending tweens
=> Tween is not possible (both clips have tweens)
4.7.3. Delete a tween¶
To delete a tween, select the starting point of the tween => properties => tween => delete.
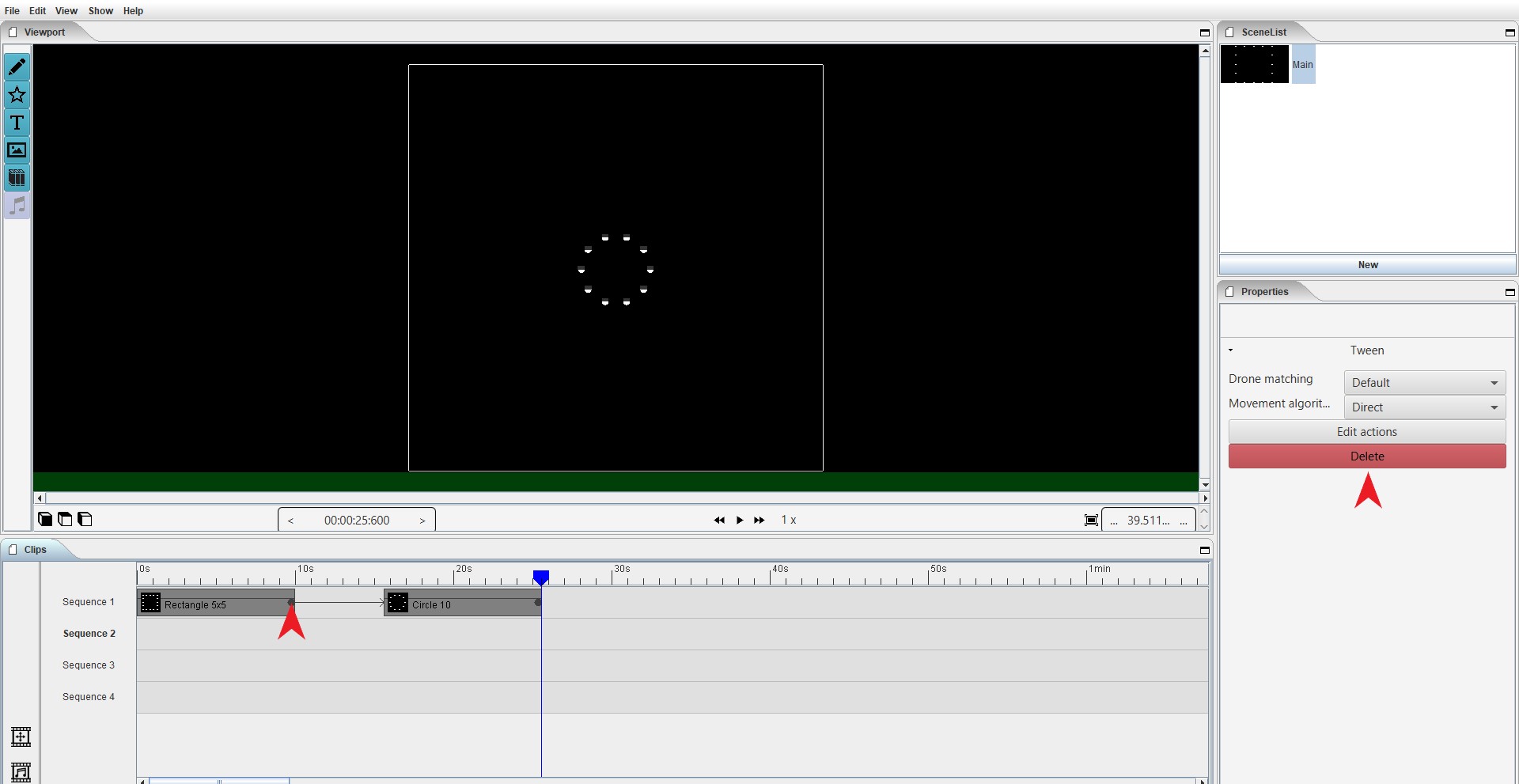
4.7.4. Tween settings¶
Drone matching
Defines which algorithm is used for matching the drones between the clips.
- Default:
The default matching algorithm
- Spread:
This is a small alteration of the default algorithm, where the paths in the solution will have a similar distance.
Movement Algorithm
Define which algorithm is used for moving the drones from one location to the other. For now “Direct” is the default.
- Direct:
Creates a linear path from the starting position to the end position. No attempt is made to make sure drones don’t cross each-other
- A star beta
Creates an advanced path between the start and end positions of the drones. Also tries to make sure drones are kept X-meter from each-other. This value can be altered in the settings “Preferred drone distance”. This algorithm is run tween by tween and cannot avoid drones in other clips or tweens.